


















Elephant Robotics myBuddy 280: Robot cộng tác 6 bậc tự do kép, robot hai tay, robot cánh tay đôi
Mã SKU: N/A
Danh mục : MyBuddy 280
ROBOT HAI TAY HIỆU QUẢ VỀ CHI PHÍ NHẤT myBuddy là sản phẩm robot hai tay đầu tiên của Elephant Robotics, sử dụng nền tảng Raspberry Pi, thuộc dòng robot dịch vụ – một robot hình người cộng tác với 13 trục chuyển động. Bán kính làm việc của mỗi cánh tay là 280mm và […]
Thông tin sản phẩm

ROBOT HAI TAY HIỆU QUẢ VỀ CHI PHÍ NHẤT
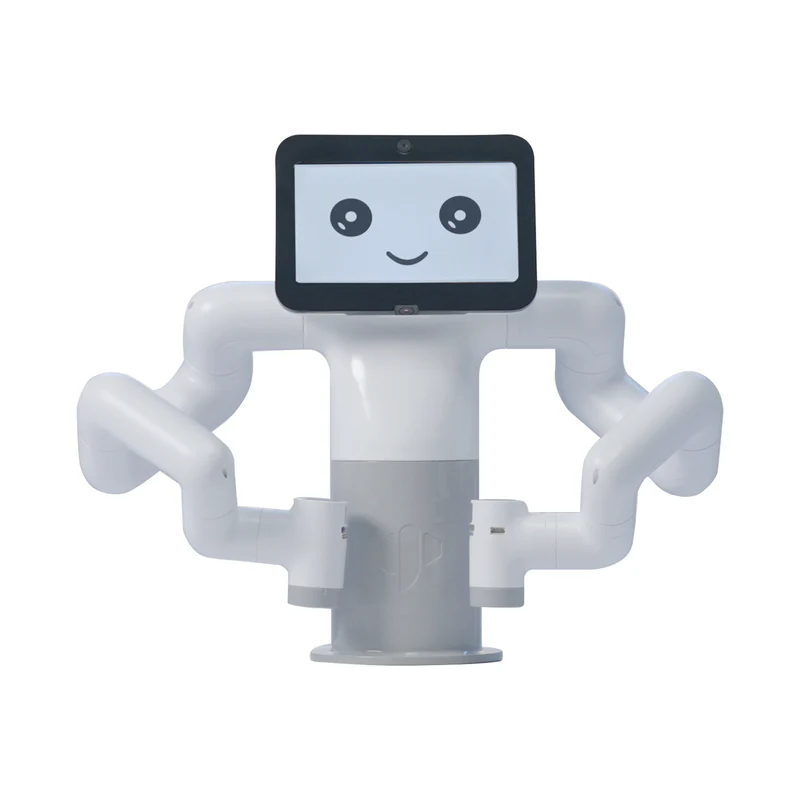
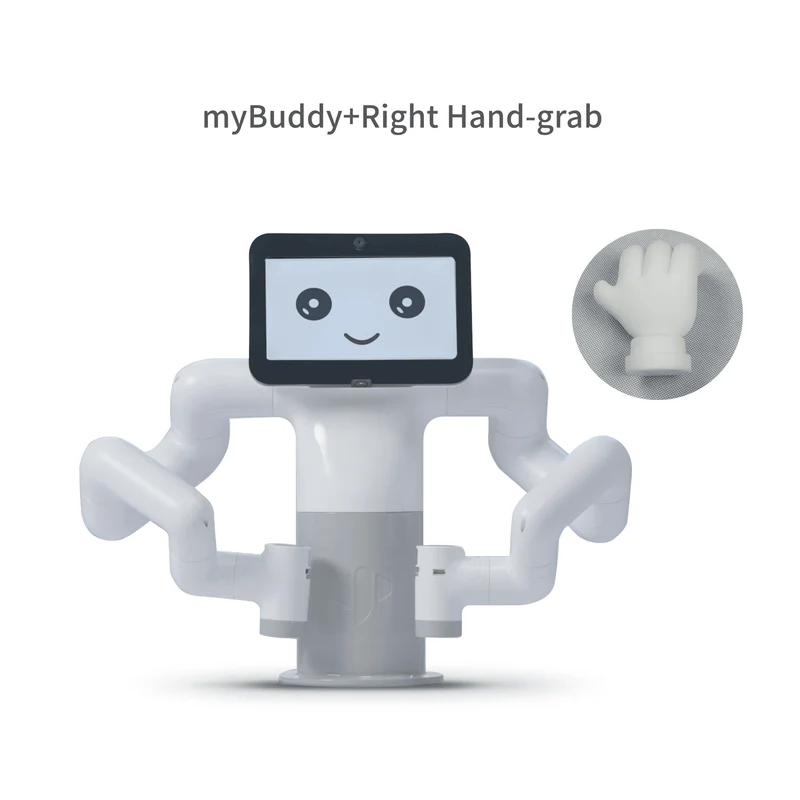
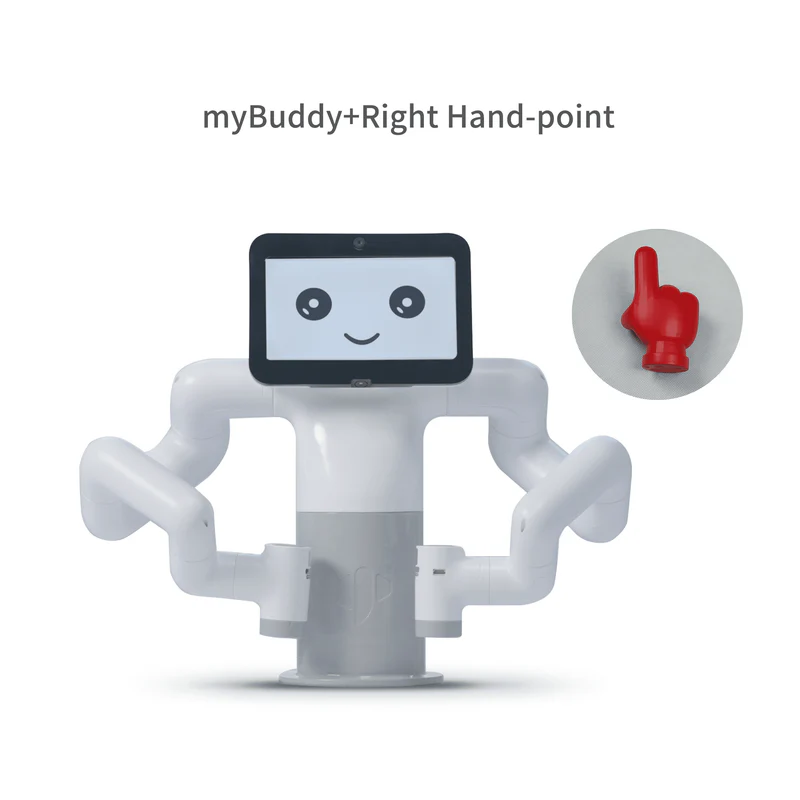
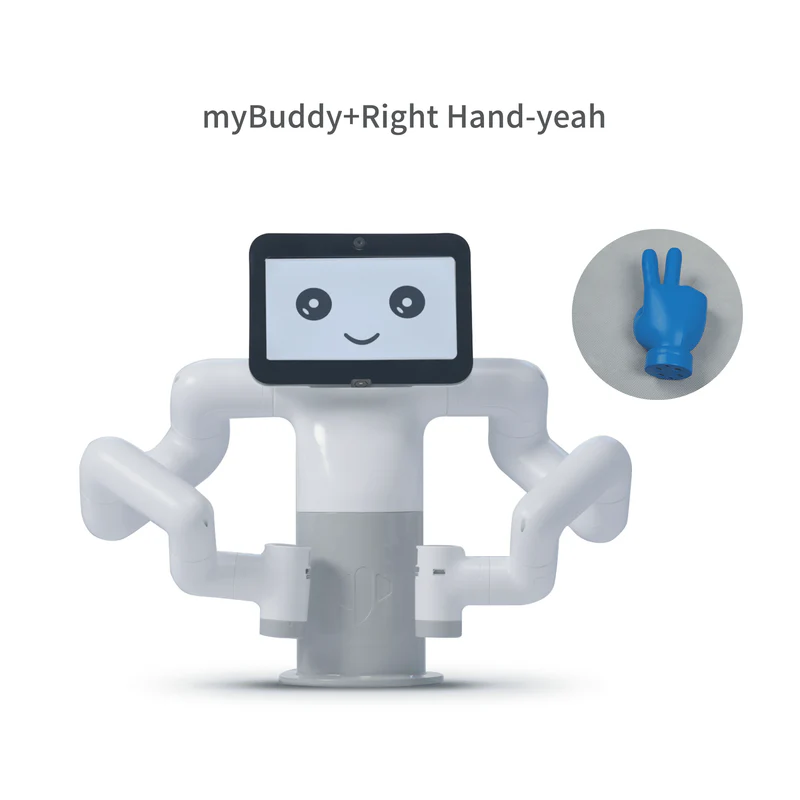
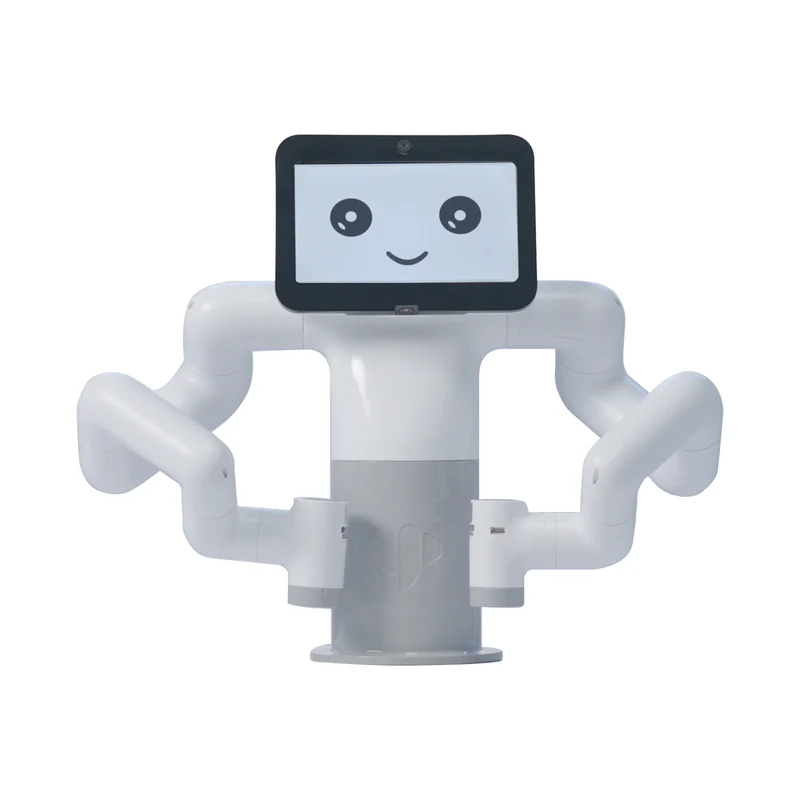
myBuddy là sản phẩm robot hai tay đầu tiên của Elephant Robotics, sử dụng nền tảng Raspberry Pi, thuộc dòng robot dịch vụ – một robot hình người cộng tác với 13 trục chuyển động. Bán kính làm việc của mỗi cánh tay là 280mm và tải trọng tối đa đạt 250g. Robot được trang bị màn hình cảm ứng 7 inch và hai camera HD 2 megapixel, đồng thời hỗ trợ cổng I/O 3.3V và cổng Lego. myBuddy có thể hoạt động cùng nhiều phụ kiện như bơm hút chân không, kẹp gắp,… đáp ứng nhu cầu đa dạng trong các ứng dụng khác nhau.
ROBOT GIÁO DỤC NGHIÊN CỨU MÃ NGUỒN MỞ
Toàn bộ thư viện điều khiển chuyển động của myBuddy được mở mã nguồn, cung cấp hơn 100 giao diện điều khiển như điều khiển góc khớp, điều khiển tọa độ,… Nhờ đó, người dùng có thể thực hiện nghiên cứu thuật toán lập kế hoạch đường đi cho robot, thuật toán tránh va chạm giữa hai cánh tay, học máy bằng thị giác máy và phát triển các ứng dụng trí tuệ nhân tạo khác. myBuddy hỗ trợ hiệu quả cho các nhà phát triển và sinh viên nâng cao năng lực nghiên cứu khoa học cá nhân.

Môi Trường Phát Triển Thị Giác
Hỗ trợ học tập và giảng dạy về công nghệ trí tuệ nhân tạo trong việc nhận diện và gắp vật. Tích hợp giao diện camera tiêu chuẩn cho AI. Camera đặt dưới góc 45 độ hỗ trợ định vị theo khu vực, nhận diện vật thể và mã QR. Camera còn lại có thể thực hiện nhận diện khuôn mặt và cơ thể người.

Hành Trình Sáng Tạo Dành Cho Người Chơi Robot
Giao diện điều khiển cấp thấp được mở hoàn toàn. Người dùng có thể tự do điều khiển các giá trị như lực mô-men, góc, tọa độ, tốc độ di chuyển và nhiều thông số khác. Hệ thống cho phép nghiên cứu ứng dụng robot hai tay, lập kế hoạch đường đi chuyển động, phát triển hành động và nhận diện hình ảnh. Nhiều loại giao diện được tích hợp sẵn giúp đáp ứng đa dạng các ứng dụng trong cả lĩnh vực thương mại và giáo dục.

Ứng Dụng Học Tập ROS
Môi trường phát triển ROS được tích hợp sẵn trong hệ thống robot, cung cấp nhiều ví dụ thực hành trong RVIZ và MOVEIT như: di chuyển theo sau, điều khiển bằng thanh trượt, lập kế hoạch đường đi và các ứng dụng nâng cao khác. Tài liệu cấu hình URDF của robot được mở, cho phép người dùng dễ dàng chỉnh sửa và phát triển thêm các tính năng theo nhu cầu.

THÔNG SỐ KỸ THUẬT
Bán kính làm việc 280mm, tải trọng tối đa 250g, độ lặp lại đạt 0.5mm – hỗ trợ bạn khám phá và thực hiện các ứng dụng theo nhu cầu thực tế.

CẤU HÌNH ƯU VIỆT
Giao diện điện công nghiệp 24V giúp đáp ứng đầy đủ nhu cầu phát triển trong môi trường công nghiệp. Tích hợp các yếu tố như nút tương tác, màn hình hiển thị, giao diện PLC – cho phép bạn xây dựng nhanh chóng và an toàn các kịch bản ứng dụng với cánh tay robot.

CÁC GIAO DIỆN MÃ NGUỒN MỞ
Dựa trên nhiều loại ứng dụng khác nhau, hệ thống mở mã nguồn các giao diện, cho phép thực hiện nhận diện vật thể, nhận diện khuôn mặt, nhận diện hình ảnh, v.v.


PHÁT TRIỂN ỨNG DỤNG THỨ CẤP
Dễ dàng học lập trình myCobot theo phong cách riêng của bạn và sẵn sàng bắt đầu hành trình khám phá thế giới robot

HỖ TRỢ ROS
Phát triển trên nền tảng ROS – hệ thống giao tiếp robot phổ biến nhất thế giới, bạn có thể điều khiển myPalletizer và kiểm tra thuật toán trong môi trường ảo. Điều này giúp giảm yêu cầu về môi trường thực nghiệm và nâng cao hiệu quả thử nghiệm.

myStudio QuickTool
Dạy và điều khiển myBuddy một cách nhanh chóng thông qua màn hình cảm ứng.










Đánh giá Elephant Robotics myBuddy 280: Robot cộng tác 6 bậc tự do kép, robot hai tay, robot cánh tay đôi