








Bộ điều khiển robot khung xương di động myController S570
Mã SKU: 4011200006
Danh mục : Cánh tay robot
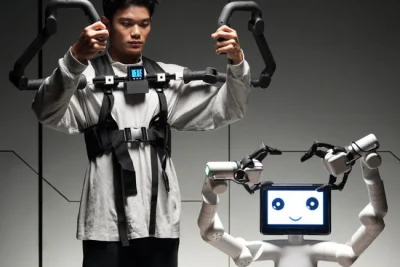
myController S570 là thiết bị khung xương di động do Elephant Robotics thiết kế, chuyên dùng để thu thập dữ liệu chuyển động. Thiết bị tương thích với các dòng robot như myCobot 280, myCobot 320, myCobot Pro 630, myAGV, mechArm 270, myArm M750, myBuddy 280, robot hình người Mercury, đồng thời có thể hoạt […]
Thông tin sản phẩm

myController S570 là thiết bị khung xương di động do Elephant Robotics thiết kế, chuyên dùng để thu thập dữ liệu chuyển động. Thiết bị tương thích với các dòng robot như myCobot 280, myCobot 320, myCobot Pro 630, myAGV, mechArm 270, myArm M750, myBuddy 280, robot hình người Mercury, đồng thời có thể hoạt động với nhiều loại robot khác nhau để phục vụ mục đích ghi dữ liệu, điều khiển từ xa và phát triển ứng dụng. Sản phẩm này giúp các nhà nghiên cứu, lập trình viên và giáo viên dễ dàng tích hợp robot vào thực tiễn và môi trường học tập.
Tình huống ứng dụng
Nghiên cứu và phát triển
S570 thu thập dữ liệu chuyển động ở tần số 100Hz, đảm bảo huấn luyện AI chính xác và ghi nhận chuyển động robot hiệu quả. Khả năng xử lý dữ liệu tiên tiến giúp thiết bị phù hợp cho các tình huống phức tạp trong nghiên cứu và phát triển thuật toán, tạo nền tảng vững chắc cho đổi mới sáng tạo.

Giáo dục và đào tạo
S570 hoạt động mượt mà với các robot có số bậc tự do khác nhau, cung cấp nền tảng linh hoạt cho việc học thực hành. Thiết bị hỗ trợ điều khiển robot trực quan, giúp sinh viên và nhà nghiên cứu nhanh chóng tiếp cận lĩnh vực robot, thúc đẩy giáo dục hấp dẫn và dễ tiếp cận.

Điều khiển robot từ xa
Với thư viện Python và hỗ trợ ROS, S570 đơn giản hóa việc tích hợp robot để thu thập dữ liệu chuyển động và điều khiển từ xa. Các định dạng tiêu chuẩn và công cụ mã nguồn mở giúp việc điều khiển từ xa trở nên dễ dàng, ngay cả với người mới bắt đầu.

Video myController S570
Trình bày điều khiển theo tình huống
myAGV & myCobot 280
myArm M750
Mercury X1
Catching and throwing napkins

Gói sản phẩm
| Bao gồm những gì? | myController S570 *1 |
|---|---|
| 8.4V Power Adapter *1 | |
| USB Data Cable *1 |
Lập trình phần mềm
Cung cấp thư viện điều khiển robot chuẩn hóa qua PyPI, hỗ trợ truy vấn góc khớp, tọa độ Descartes và nhiều hơn nữa. Hỗ trợ cả ROS1 và ROS2, đi kèm mô phỏng RViz và hiển thị trạng thái robot theo thời gian thực.

Thông số sản phẩm
| Name | myController S570 – Exoskeleton Controller | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| DOF | 12 (6+6) | |||||||||
| Tầm với cánh tay | 570mm per arm | |||||||||
| Tổng sải tay | 1500mm | |||||||||
| Trọng lượng | 1.5kg | |||||||||
| Nguồn cấp | 8.4V, 2A | |||||||||
| Phạm vi xoay | ±180° | |||||||||
| Kết nối USB | Type-C | |||||||||
| Màn hình hiển thị LCD | 2.0″ @ 320×240, IPS panel, 853 nits max brightness | |||||||||
| Tốc độ truyền dữ liệu | Up to 100Hz | |||||||||
| Bộ điều khiển chính | ESP32 (Basic), 240MHz dual-core, 600 DMIPS, 520KB SRAM, dual-mode Bluetooth and Wi-Fi | |||||||||
| Bộ điều khiển phụ | ESP32 ×2 (Atom), 4MB Flash, 5×5 LED Matrix | |||||||||
| Các giao diện | Provides access to joint position, speed, acceleration, button status, joystick state, gyroscope data, and customizable LED colors (read/write) | |||||||||
| Định dạng tệp hỗ trợ | Supports 3D-Step and 2D CAD files | |||||||||
| Vị trí hiện tại | Read | |||||||||
| Tốc độ hiện tại | Read | |||||||||
| Gia tốc hiện tại | Read | |||||||||
| Trạng thái nút bấm | Read | |||||||||
| Trạng thái cần điều khiển | Read | |||||||||
| Dữ liệu con quay hồi chuyển | Read | |||||||||
| Màu đèn LED | Read/Write | |||||||||
| Tương thích với robot |
|












Đánh giá Bộ điều khiển robot khung xương di động myController S570